- Home
- Products
- Solutions
- Newsroom
- Support
- About Us
- Contact Us
- Reseller
- Scope
- EN
PRODUCTS
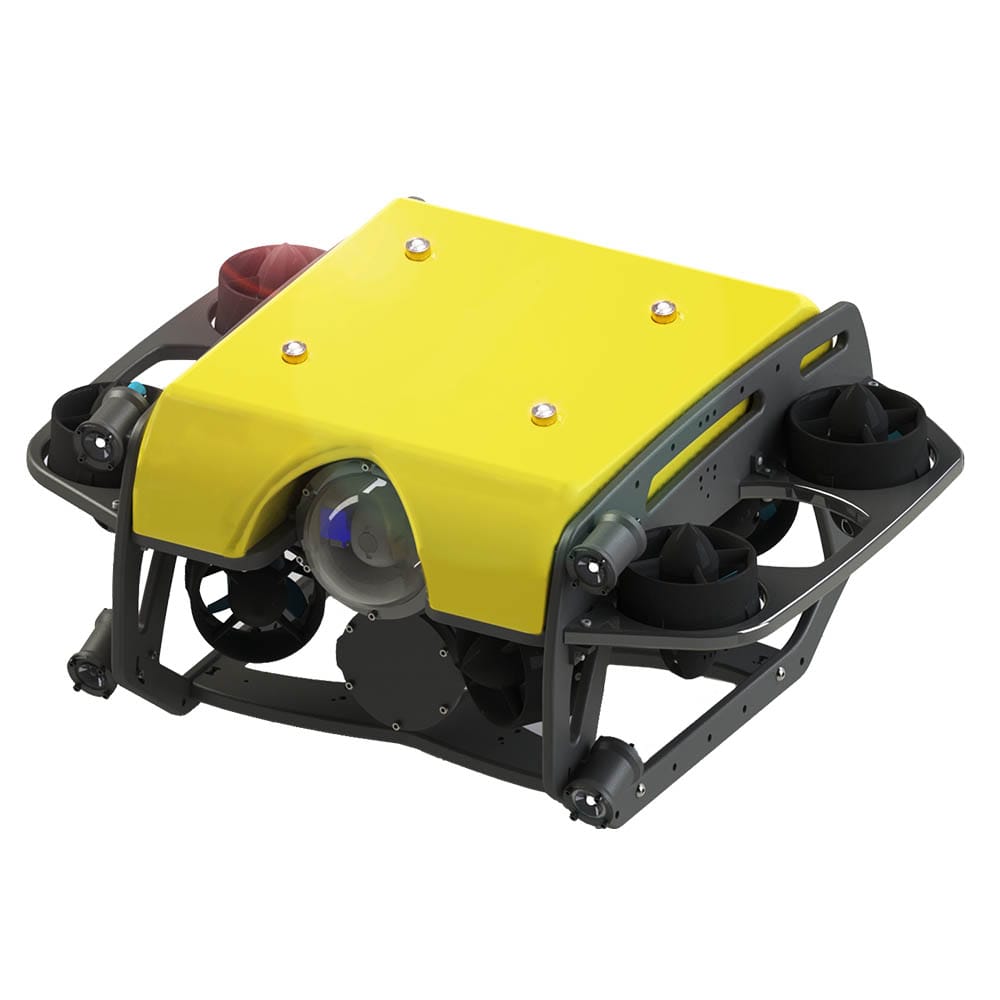
ND-UR002 Remotely Operated Vehicle
Overview
ND-UR002 Remotely Operated Vehicle is powered by a shore-based supply, enabling sustained high-power operation over extended periods. It communicates and is controlled via a wireless remote link to the ground station, with support for customizable and complex operational modes. The main controller provides both serial ports and a standard CAN bus as communication interfaces.
ND-UR002 can move quickly underwater and achieve six degrees of freedom (6-DOF) omnidirectional motion and observation underwater. It features functions such as automatic depth-stabilized hovering, automatic directional cruising, and constant-speed navigation. The vehicle can be equipped with underwater cameras, sonars, and robotic arms, and other tools for underwater reconnaissance or operational tasks.
Despite its relatively lightweight design, the ND-UR002 can withstand pressures at depths of up to 150 meters. It can quickly reach deep-water areas or inaccessible zones to conduct rapid searches or carry various functional modules to assist professional rescue personnel.
Features
- Fast movement
- Video investigation
- Search and rescue
- Reserved interfaces
- Intelligent control
Specifications
| Underwater vehicle | Weight | 15.5kg (attached equipment excluded) |
| Speed | 1.5m/s | |
| Max. operating depth | 150m (at 100m water depth) | |
| Thrusters | 6 units; Thrust: ≥7kgf | |
| Lighting lamps | 2200LM x 2 | |
| Pan-tilt camera x 1 (internally installed) | Resolution: 1080P | |
| Effective pixels: 2 million | ||
| Optical zoom: 4x | ||
| Sensors | Basic 9-axis attitude sensor, depth sensor, electronic compass, temperature sensor, humidity sensor | |
| Operating temperature | -20℃ – 65℃ | |
| External power supply | Shore AC 220V power supply, providing power to the underwater ROV through umbilical cable | |
| Ground station | Parameters | 12-inch display, wireless controller and matching electrical hardware |
| Configuration | i5 processor, 4G memory, 1T hard drive, Windows operating system | |
| Terminal display | Parameters | Video, date, time, water depth, speed, course, temperature and humidity, attitude yaw angle, pitch angle, motion mode, LED, device battery level, cabin leakage alarm, etc. |
| Manual winch and umbilical cable | Standard configuration | 150m |
| Tensile strength | ≥ 100kgf |