- Inicio
- Productos
- Soluciones
- Sala de Noticias
- Servicios
- Nosotros
- Contacto
- Agente
- ES
Productos
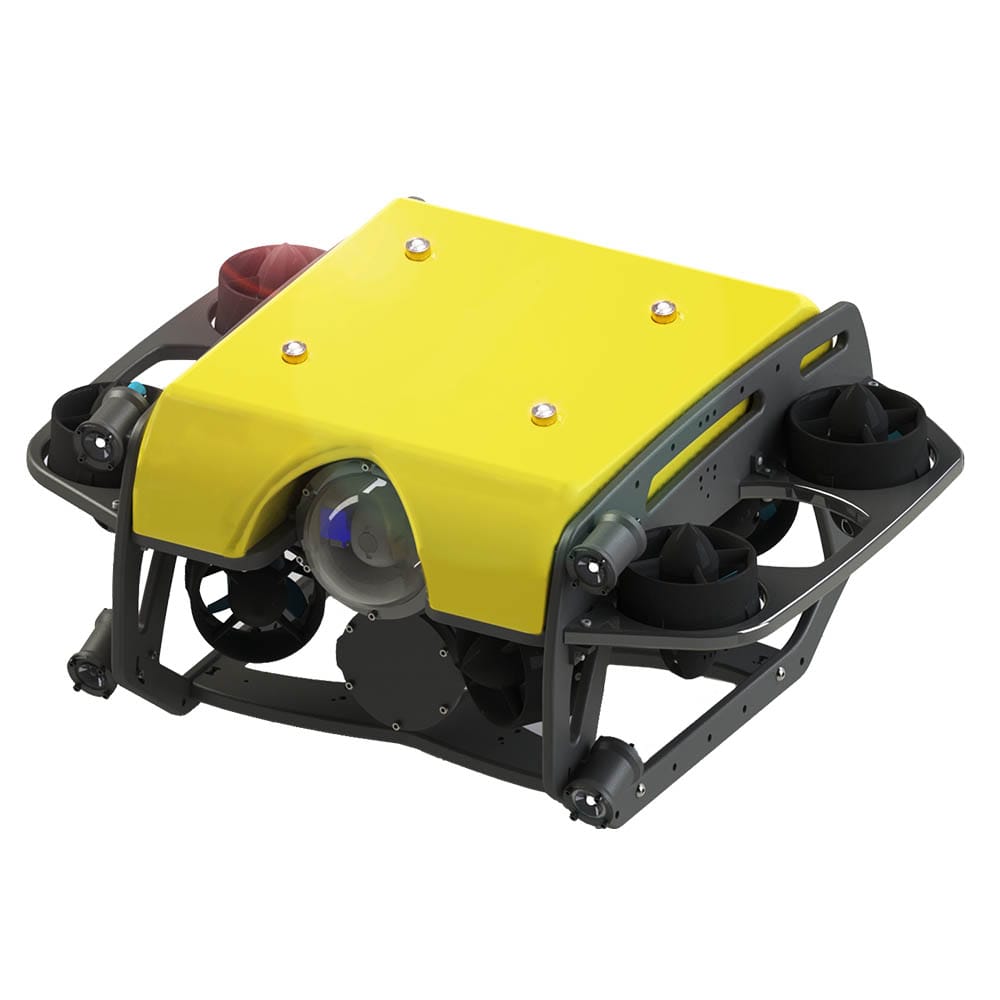
ND-UR002 Vehículo Operado Remotamente
Descripción General
ND-UR002 Vehículo Operado Remotamente es alimentado por un suministro desde tierra, permitiéndole mantener una operación de alta potencia a través de largos periodos de tiempo. Se comunica y es controlado a través de un enlace remoto inalámbrico a la estación en tierra, con posibilidad de modos operativos personalizables y complejos. El control principal proporciona tanto puertos seriales como un bus CAN estándar como interfaces de comunicación.
ND-UR002 puede desplazarse rápidamente bajo el agua y lograr 6 grados de libertad (6-DOF), movimiento omnidireccional y observación bajo el agua. Incluye funciones tales como flotar en posición de forma automática con estabilización de profundidad, crucero direccional automático, y navegación de velocidad constante. El vehículo puede ser equipado con cámaras subacuáticas, sonares, brazos robóticos, y otras herramientas para reconocimiento subacuático o tareas operativas.
A pesar de su diseño relativamente liviano, ND-UR002 puede soportar presiones a profundidades de hasta 150m. Puede alcanzar áreas profundas rápidamente o zonas inaccesibles para realizar búsquedas rápidas o llevar a cabo varios módulos funcionales para asistir al personal de rescate profesional.
Características
- Rápido movimiento
- Investigación por video
- Búsqueda y rescate
- Interfaces reservadas
- Control inteligente
Especificaciones
| Vehículo subacuático | Peso | 15.5kg (sin equipo añadido) |
| Velocidad | 1.5m/s | |
| Profundidad de operación máxima | 150m (a una profundidad de 100m) | |
| Propulsores | 6 unidades; Empuje: ≥7kgf | |
| Lámparas de iluminación | 2200LM x 2 | |
| Cámara de giro e inclinación (instalada internamente) | Resolución:1080P | |
| Pixeles efectivos: 2 millones | ||
| Zoom óptico: 4x | ||
| Sensores | Sensor de 9 ejes básico, sensor de profundidad, brújula electrónica, sensor de temperatura, sensor de humedad | |
| Temperatura de operación | -20℃ – 65℃ | |
| Fuente de poder externa | Fuente de poder desde tierra en CA de 220V, proporcionando energía al ROV subacuático a través de un cable umbilical. | |
| Estación en tierra | Parámetros | Pantalla de 12 pulgadas, control inalámbrico y equipo eléctrico compatible. |
| Configuración | Procesador i5, memoria 4G, disco duro de 1TB, sistema operativo Windows | |
| Pantalla de la terminal | Parámetros | Video, fecha, tiempo, profundidad del agua, velocidad, curso, temperatura y humedad, ángulo de actitud de guiñada, ángulo de cabeceo, modo de movimiento, LED, nivel de batería del dispositivo, alarma de filtración en cabina, etc. |
| Cabrestante manual y cable umbilical | Configuración estándar | 150m |
| Resistencia a la tracción | ≥ 100kgf |